


岡山大学 学術研究院 環境生命自然科学学域
Faculty of Environmental, Life, Natural Science and Technology
知性あるロボットで、人と社会の未来を切り拓く
Pioneering the future of humans and society through intelligent robots
Research AreasWhat we work on
肺がんRFA療法を支援する遠隔操作ロボット「Zerobot」の開発。医師の被曝を軽減し、2018年岡大病院での臨床試験で安全性を確認。
Developing "Zerobot," a teleoperated robot for CT-guided RFA of lung cancer. Clinical trials at Okayama University Hospital (2018) confirmed safe needle insertion in ten patients.
詳しく見るLearn more
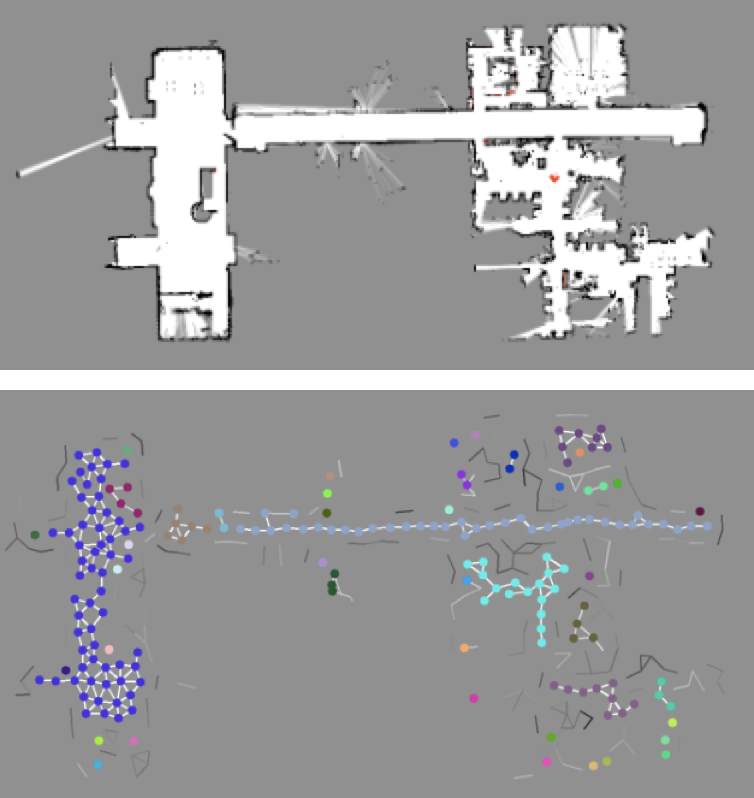
GNGを基盤とした教師なし学習アルゴリズムの研究と、ラベルなしデータから自律的に学習する移動ロボットへの応用。
Unsupervised learning algorithms based on Growing Neural Gas, enabling autonomous mobile robots to learn biologically-inspired perception in dynamic environments.
詳しく見るLearn more
機械学習・強化学習を用いてヘビ型ロボットの移動制御を自律的に獲得。狭隘空間・がれき内など過酷環境での活動を目指します。
Applying machine learning and reinforcement learning to develop autonomous locomotion for snake robots operating in narrow spaces, rubble, and other challenging environments.
詳しく見るLearn more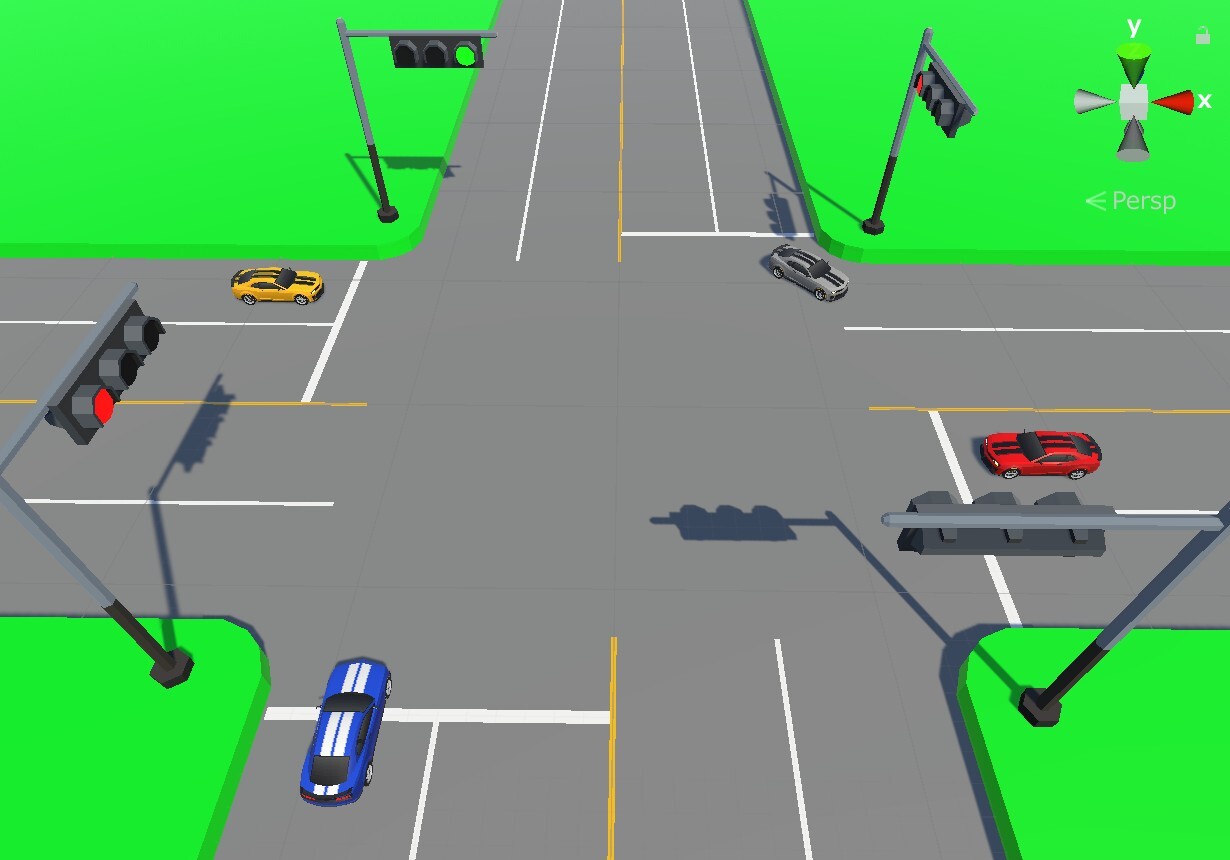
3D都市環境で自動運転車と一般車を混在させた独自シミュレータにより、交通流・事故率・道路設計を仮想空間で定量的に検証します。
A custom 3D driving simulator with mixed autonomous and conventional traffic enables quantitative evaluation of traffic flow, accident rates, and road design in virtual urban environments.
詳しく見るLearn more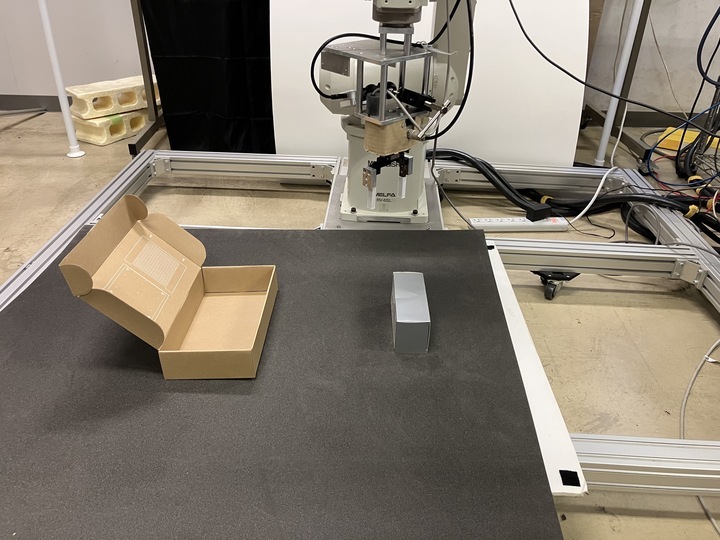
産業用アームロボットに知能を付与し、紙・布・テープなど形状が定まらない「不定形物体」の把持・操作を実現します。光学フローを活用したリアルタイム形状認識、タスク計画、センサフィードバック制御を統合することで、従来の固定プログラムでは対応できなかった柔軟性の高い自律的な作業を可能にします。
We endow industrial manipulator arms with intelligence to handle deformable objects — such as paper, cloth, and tape — whose shape changes unpredictably. By integrating optical flow-based real-time shape recognition, task planning, and sensor feedback control, the system achieves flexible autonomous operations beyond the reach of conventionally programmed robots.
詳しく見るLearn more
老朽化コンクリート構造物の補修に必要なはつり作業をロボットで自動化。振動・粉塵環境での人的負担を軽減します。
Automating concrete chipping for aging structure repair using robots, reducing human exposure to severe vibration and dust through integrated sensing and control.
詳しく見るLearn more
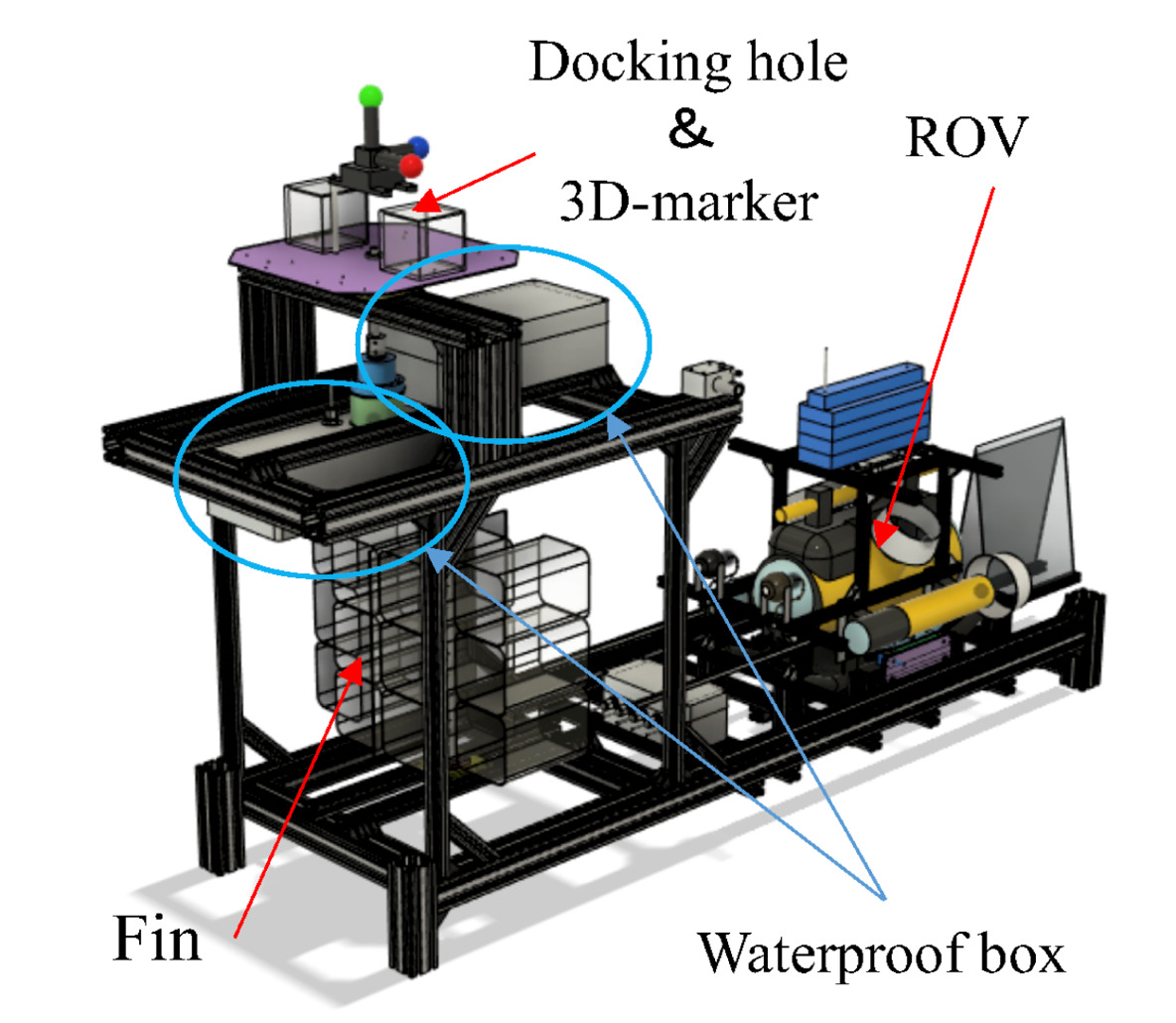
デュアルカメラによる3D環境認識を搭載した自律水中ロボットの研究。実海域での長時間自律充電運用の実証に成功。
Autonomous underwater vehicle with dual-camera 3D perception for marine resource exploration. Successfully demonstrated extended autonomous charging in real ocean conditions.
詳しく見るLearn more
大規模言語モデルを活用し、月面・災害環境でのドローン群・地上ロボット・建機の協調システムを構築。内閣府ムーンショット事業の成果を基盤とします。
LLM-powered coordination for heterogeneous robot teams — drones, ground vehicles, and construction robots — operating in lunar and disaster environments, built on Cabinet Office Moonshot R&D outcomes.
詳しく見るLearn moreお知らせ・受賞情報Announcements & Awards
About Our LaboratoryIRCL — Okayama University
適応学習システム制御学研究室は、岡山大学 学術研究院 環境生命自然科学学域に所属し、知能ロボットと機械学習の融合を核とした研究を展開しています。医療支援ロボット・マニピュレータロボットの知能化・自動運転・自己組織化ニューラルネットワークという4つの柱を中心に、実社会課題の解決に取り組んでいます。
The Intelligent Robotics and Control Laboratory (IRCL) is part of the Faculty of Environmental, Life, Natural Science and Technology at Okayama University. We explore the intersection of intelligent robotics and machine learning, tackling real-world challenges across four research pillars: medical robotics, intelligent manipulator robotics, autonomous driving, and bio-inspired neural networks.
研究詳細へExplore Research| 所在地Location |
〒700-8530 岡山市北区津島中3-1-1 自然科学総合研究棟3階 3F, Natural Science Bldg. Tsushima-Naka 3-1-1, Kita-ku Okayama 700-8530, Japan |
| 指導教員Faculty |
松野 隆幸(教授) 戸田 雄一郎(准教授) 王 永東(助教) MATSUNO Takayuki (Prof.) TODA Yuichiro (Assoc. Prof.) WANG Yongdong (Asst. Prof.) |
| 研究室員Members | 博士1名・修士25名・学部13名1 PhD · 25 Master's · 13 Undergraduate |