研究紹介
ソフトロボットハンド・ソフトロボットアーム
人工筋肉から構成される多数の指をもつソフトロボットハンドを開発しています。 柔軟性によってさまざまな物体を把持することが可能です。
ソフトロボットハンド
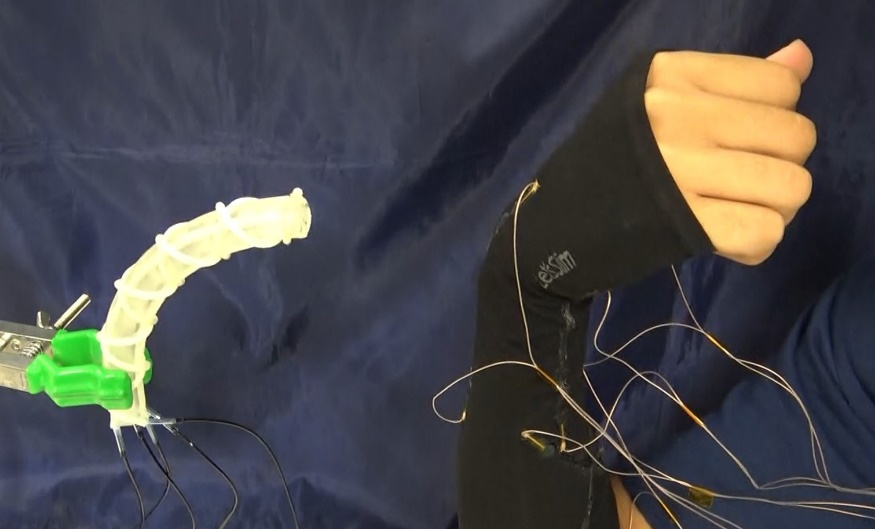
多数の人工筋肉を様々な方向に配置することで湾曲やねじり動作が可能なロボットアームを開発しています。 骨格を持たないタコの腕構造を模倣したり、人の腕の動作に倣った動作を実現したりしています。
ソフトロボットアーム
人工筋肉から構成される多数の指をもつソフトロボットハンドを開発しています。 柔軟性によってさまざまな物体を把持することが可能です。
ソフトロボットハンド
多数の人工筋肉を様々な方向に配置することで湾曲やねじり動作が可能なロボットアームを開発しています。 骨格を持たないタコの腕構造を模倣したり、人の腕の動作に倣った動作を実現したりしています。
ソフトロボットアーム