岡山大学 工学部 工学科 機械システム系 機械工学コース
機械設計学研究室
研究スタッフ
研究内容1
研究内容2
研究業績
ENGLISH
EN
アクセス
研究内容1
JKA補助事業
アクチュエータ&センサの基礎研究 (詳細は各テーマ名をクリック!)
多様な空気圧人工筋肉の製造プロセス
スマート空気圧人工筋肉
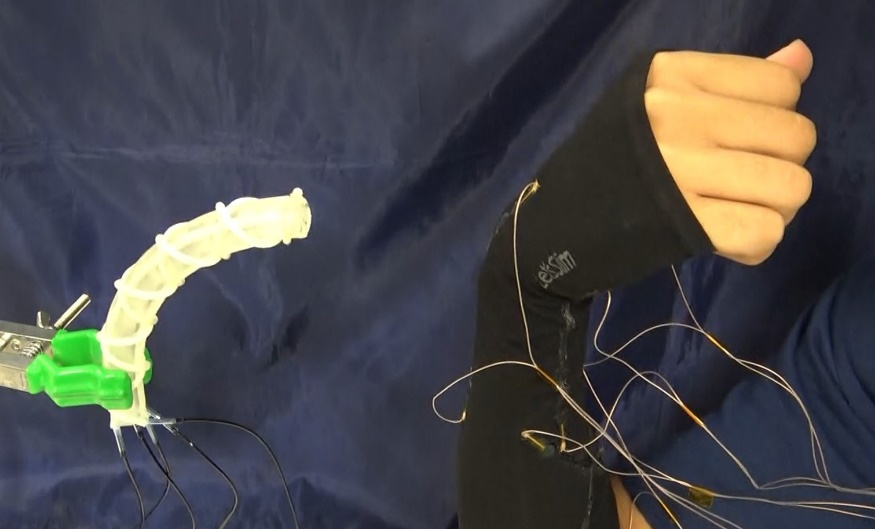
湾曲型空気圧ソフトアクチュエータ
応用機構の開発 (詳細は各テーマ名をクリック!)
ソフトロボットハンド・ソフトロボットアーム
医療・福祉機器
PAGE TOP