ハイパワーヘビ型ロボット
いろいろな移動形態の検証用に開発。

いろいろな移動形態の検証用に開発。

ImPACTプロジェクトで開発されたヘビ型ロボット。無線接続で動作し、ゴムカバーにより防塵防水を実現している。

西日本豪雨災害で被害にあった倒壊家屋の内部をヘビ型ロボットが調査しました.
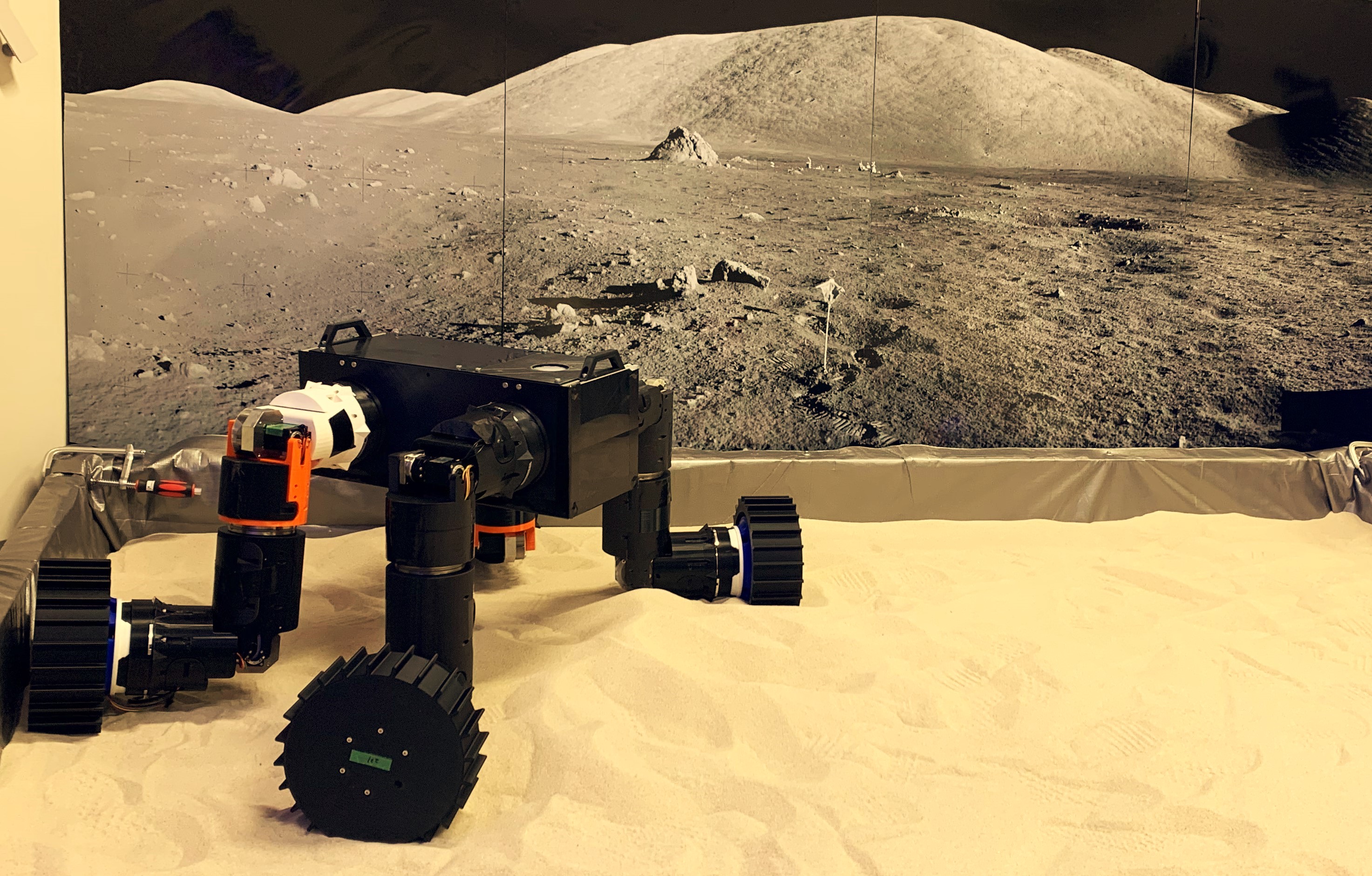
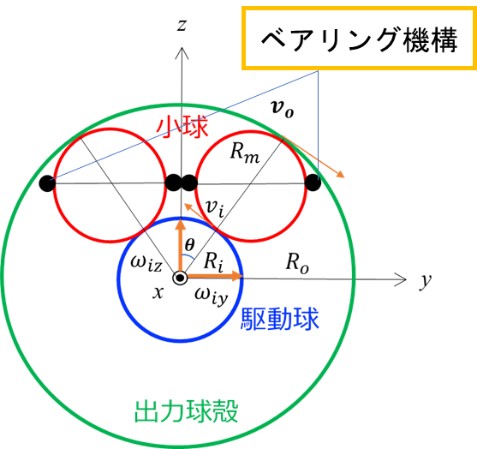
ムーンショットプロジェクトで開発中のロボット。岡大チームは脚(LIMBモジュール)を担当。

走破性の高いクローラ型の移動ロボット。もとはNBCR災害対応ロボットとして開発された。
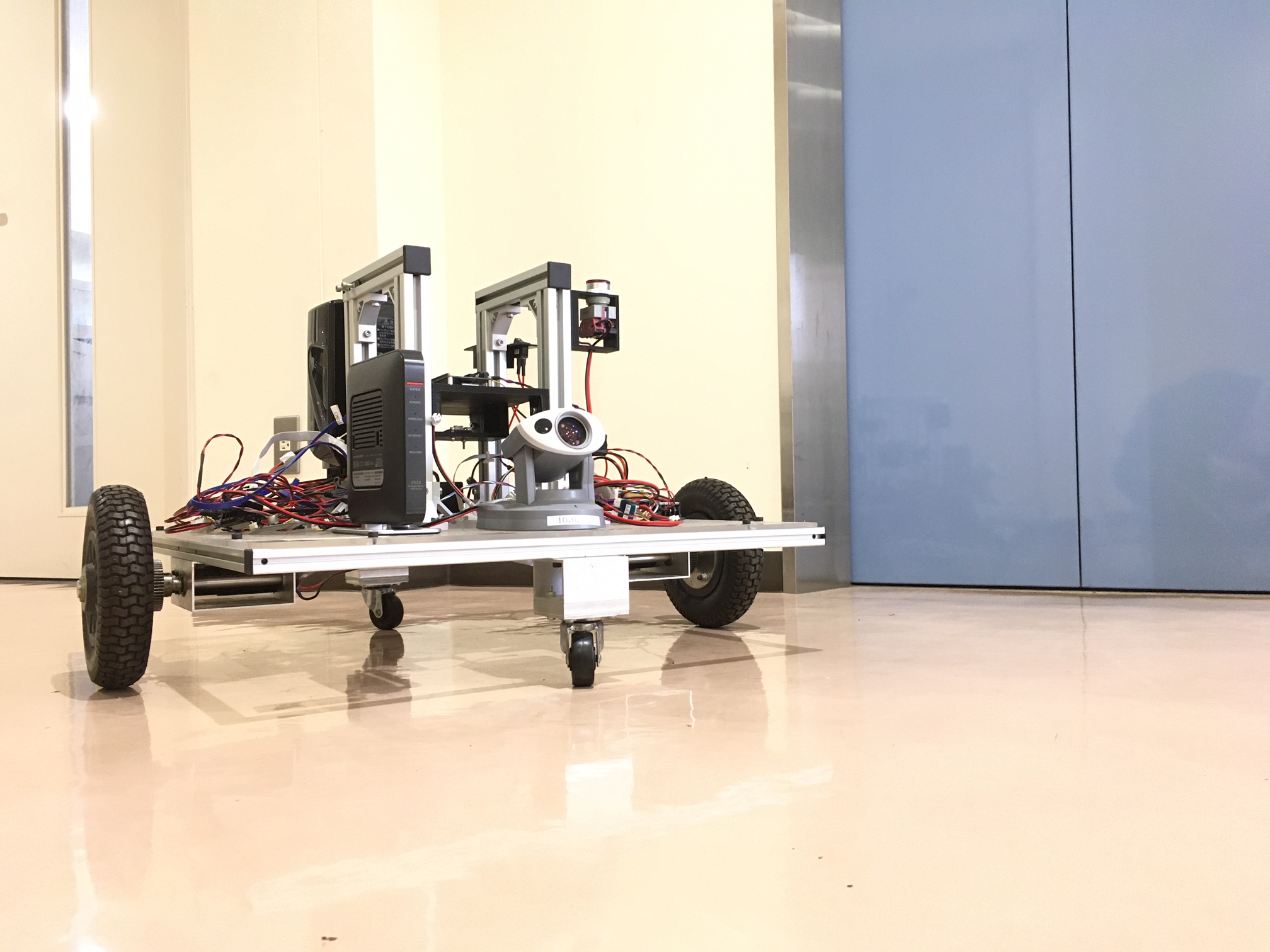
平坦な屋内環境実験用ロボット。

自己位置推定や環境地図作成は遠隔操作や自律移動の際に必要になります。本研究室では、揺動機構や回転式LiDARを使用して研究を行っています。
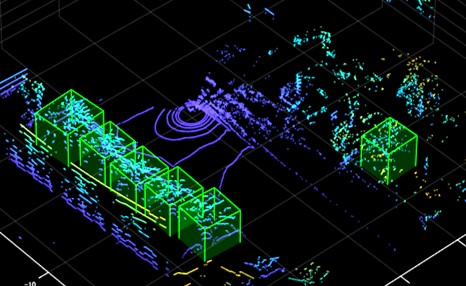
目的地まで自律移動したり、災害現場を探索する際には、周囲から目的の物体を認識することが必要です。 本研究では樹木の点群を学習して認識できるように研究を行っています。
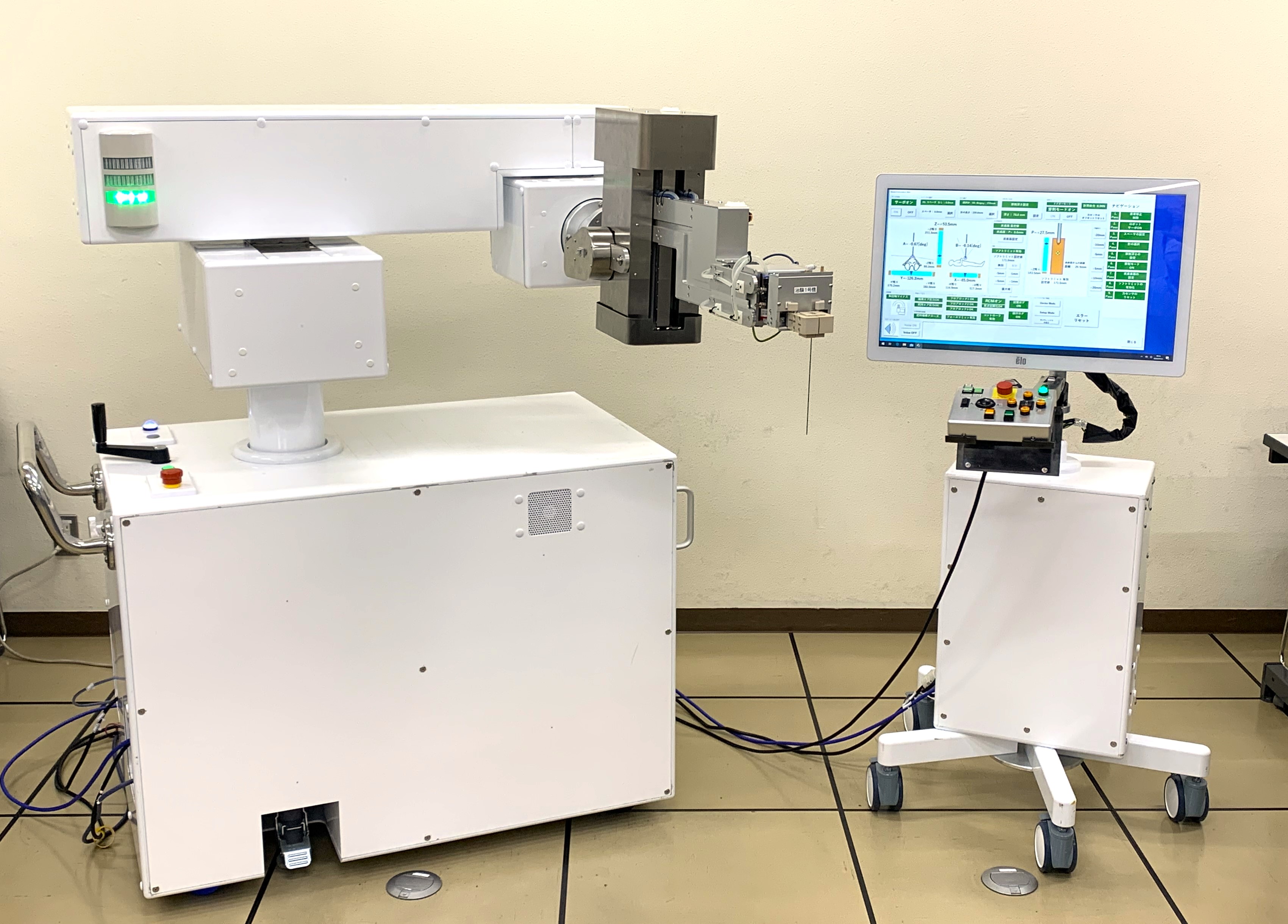
CTガイド下で使用する針穿刺ロボットとインタフェース。

2018年にはFirst-in-Human試験を特定臨床研究として実施し,10例の生検を安全に完遂し,人において十分に使用可能であることを確認しました.さらに,2020年度から2022年度にかけて医師主導治験を実施しました.